彭卫东,陈 新,李克天,敖银辉(广东工业大学,广东 广州 510090)
摘要:针对所设计的IC芯片粘片机的并联焊头机构,建立了机构的振动方程和动刚度模型,使用Matlab软件得出了机构在整个工作空间的动刚度特性曲线,并对其分布进行了分析。根据这些曲线,说明所设计的并联焊头机构的动刚度能满足IC芯片粘片机的工作要求。
关键词:并联焊头机构;动刚度;振动方程;特性曲线
高速高精度IC芯片粘片机是主要的IC芯片封装设备之一,定位精度和运动精度是其重要的技术指标,而定位精度和运动精度是与其动刚度密不可分的[1]。目前国内外IC芯片粘片机的焊头机构都采用串联结构的形式,运动部件的惯量很大,不利于粘片速度和定位精度的提高[2]。而并联机构以结构刚度大、承载能力强、定位精度和运动精度高、重量轻等特点,引起了各国学者的广泛关注[3~5],此机构现阶段主要应用于机床、机器人等领域.国内外针对IC芯片粘片机并联机构的综合研究尚未见报道。为利用并联机构独特的优点,并将其应用于IC芯片粘片机的焊头机构,必须对其动刚度进行分析。
动刚度分析在机床主轴设计和优化方面的应用较为普遍,分析的方法主要有虚功原理、拉格朗日方程、牛顿―欧拉法、有限元法等[6~7]。分析时,将机架看作刚体,机床主轴看作弹性杆,支撑轴承等当作弹簧。本文应用Lagrange法建立IC芯片粘片机并联焊头机构的动刚度模型,并利用Matlab软件对机构的动刚度进行仿真,目的在于研究机构的动刚度与工作位置的关系,以此作为IC芯片粘片机并联焊头机构优化设计的依据。
1 机构简介与基本假设
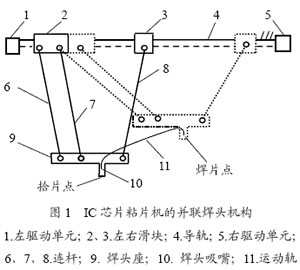
图1为IC芯片粘片机的并联焊头机构。安装在机架上的两个驱动电机1和5,分别带动左右滑块2和3 沿导轨4左右运动,连杆6、7、8 长度相等且和左右滑块及焊头座9 铰接,连杆6 和7、左滑块及焊头座形成一个平行四边形结构,因而焊头座同导轨始终平行。当左右滑块以一定速度移动时,固定在焊头座上的吸嘴10 可以沿X、Y 方向运动。11为焊头的运动轨迹,左右两边有一小段垂线,为拾取晶片和焊接晶片时的预定轨迹,中间部分为假想机构传送晶片的路径。此机构为二自由度并联机构。
对于并联焊头机构,影响动刚度的主要因素有各连杆的刚度,固定台架和焊头座的刚度,机构的几何结构和焊头座的位置。
为了便于分析,首先将整机划分为机架、连杆和焊头座3个子结构,并作以下假设:①固定台架和焊头座为刚体;②连杆为弹性体,忽略连杆的质量,球铰为理想约束;③各杆件弹性变形满足小位移假设,真实运动可视为刚体运动和弹性位移的迭加,且刚体运动为已知。
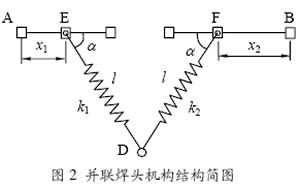
根据以上假设,将IC芯片粘片机的并联焊头机构进行简化,如图2所示。连杆ED、DF的刚度分别为k1、k2,长度为l,左右驱动电机A、B 之间的距离为LAB。
 |
